
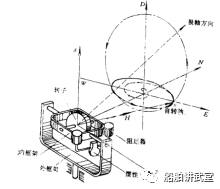
电罗经(陀螺罗经)类型、原理及误差消除方法
发表于 2020-11-04 16:37
简介
长期以来,磁罗经作为测定船舶方位用的的指向仪器,在各类船舶上得到广泛应用。然而随着航海事业和造船技术的发展,钢船代替了了木船,特别是大中型船舶和潜水艇的出现,磁罗经的可靠性和精确度远不能满足要求,这就促使人们寻求新的指向仪器,不久陀螺罗经问世。

陀螺罗经作为一种能够准确寻找真北的导航仪器,已被广泛地应用在舰船上,成为海上导航的主要仪器,并被视为现代惯性导航的先驱。
类型
近代航海所使用的陀螺罗经,可分为安许茨、斯伯利和阿玛一勃朗等三大系列。
任何一种系列的陀螺罗经,均由主罗经及其附属设备组成。主罗经是陀螺罗经的主体,具有指示航向的功能;附属设备则是确保主罗经正常工作并提供相应功能的必需设备。
指北原理
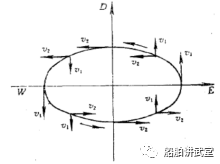
陀螺罗经原理示意图
由右图的圆轨迹可以看出在不加任何约束下,二自由度陀螺仪无法指示真北,只有将陀螺极点的运动轨迹收敛,使自转轴返回到子午面,才能实现指北。由此引出陀螺罗经的两个基本要求:一是主轴相对于地球具有稳定位置;二是当主轴受到干扰偏离稳定位置后,应能自动返回稳定位置 [3] 。
为此采用两个措施来满足陀螺罗经的要求:一是由修正装置使极点运动轨迹变为椭圆,且椭圆长半轴小于圆的半径;二是由阻尼装置使极点的椭圆轨迹收敛。修正装置通常由重力产生修正力矩,或者利用电磁力矩作为修正力矩,由此不同产生三大系列的陀螺罗经,即安许茨、斯伯利和阿玛一勃朗等三大系列。安许茨陀螺罗经采用下重法获得控制力矩,斯伯利陀螺罗经采用上重法获得控制力矩,统称为摆式陀螺罗经;阿玛一勃朗陀螺罗经采用力矩器和电磁结构,用电磁感应方法产生电磁控制力矩,又称为电控罗经。
由下重法的摆式陀螺罗经为例,陀螺内框架组件的重心相对支承轴中心向下偏移一个距离,或者在内框组件下方附加一个质量使质心下降,如下图所示。
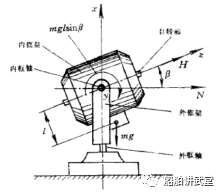
摆式罗经的修正力矩
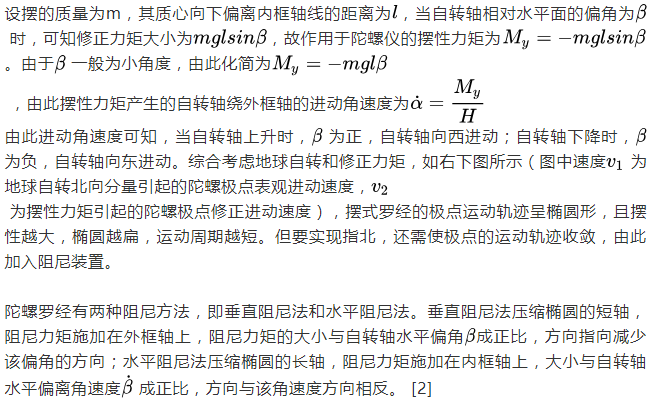
综合地球自转角速度,修正力矩和阻尼力矩实现陀螺罗经的指北。
无阻尼罗经的极点运动轨迹
误差
纬度误差或阻尼误差
产生原因:采用垂直阻尼法所造成。
消除方法:
(1)外补偿法——根据纬度误差公式计算出纬度误差的大小和符号,并从陀螺罗经的读数中扣除;
(2)内补偿法——计算并输出按纬度误差规律变换的信号,对陀螺罗经施加补偿力矩。
速度误差
产生原因:基座的运动使陀螺罗经主轴的牵连运动发生变化而产生指向误差。
消除方法:
(1)速度误差校正表;
(2)外补偿法——用机械模拟方法按照速度误差的表达式计算出误差值并在航向读数中扣除;
(3)内补偿法——计算并输出有规律的速度误差补偿力矩,对陀螺罗经实施补偿。
其它误差
1)冲击误差
船舶做机动航行时,在惯性力的作用下,陀螺罗经主轴在机动持续时间内由机动开始时的稳定位置转向机动终了时的稳定位置而出现的指向误差。
2)基线误差
安装罗经时或使用过程中,罗经的基线与船首尾线不重合或不平行时产生的误差。
3)摇摆误差
船舶摇摆时,陀螺罗经产生的误差。 [4]
参考文献:
1. 黄德鸣.惯性技术:神奇的指路魔杖:山东教育出版社,2001
2. 于波,***相,郭秀中.惯性技术:北京航空航天大学出版社 ,1994
3. 陆文兴.航海仪器:大连海事大学出版社,2000
4. 任茂东.船用陀螺罗经:大连海事学院出版社,1993
免责申明:本文来自船舶讲武堂,仅代表作者观点,不代表中国海员之家立场。其真实性及原创性未能得到中国海员之家证实,在此感谢原作者的辛苦创作,如转载涉及版权等问题,请作者与我们联系,我们将在第一时间处理,谢谢!联系邮箱:cnisu@foxmail.com
 联系我们人工客服
联系我们人工客服


















 :1391995811
:1391995811


评论 (0人参与)