
来自:中国船检
地址: https://mp.weixin.qq.com/s/uUy_7X4rwiCyo29qmyXX-A
第189期
一、验证GPS船位有效性的顺序原则
按现在航海流行的校核GPS定位有效性的顺序按VRGC原则选取,即:
V—Visual(视觉定位)、利用岸上的叠标、串视线、固定物标方位线等。
R—Radar(雷达定位)和PI- Parallel Index(平行标线法)等。
G—GPS(两台GPS接收仪的交叉检查,也是本文的重点)。
C—Celestial Navigation(天文航海),目前不具有实用性,但需掌握其方法。
沿岸航行时必须在合适的时间间隔以视觉、雷达手动定位、平行避险线等方法复核船位,但在无可视物标情况下,可通过双GPS接收仪交叉复核船位《也包括北斗(BDS)系列,下同》,这方法目前被行业认可,某些船舶管理公司更因此明确了相关操作要求,并要求将验证结果记入到ENC(官方电子海图)上。
应意识到,值班驾驶员掌握和了解这个技能,对于仅用ECDIS导航的无纸化船舶显得尤为重要。
二、双GPS校核方法的运用过程
利用此方法时,值班驾驶员应了解和掌握下列几个概念和参数
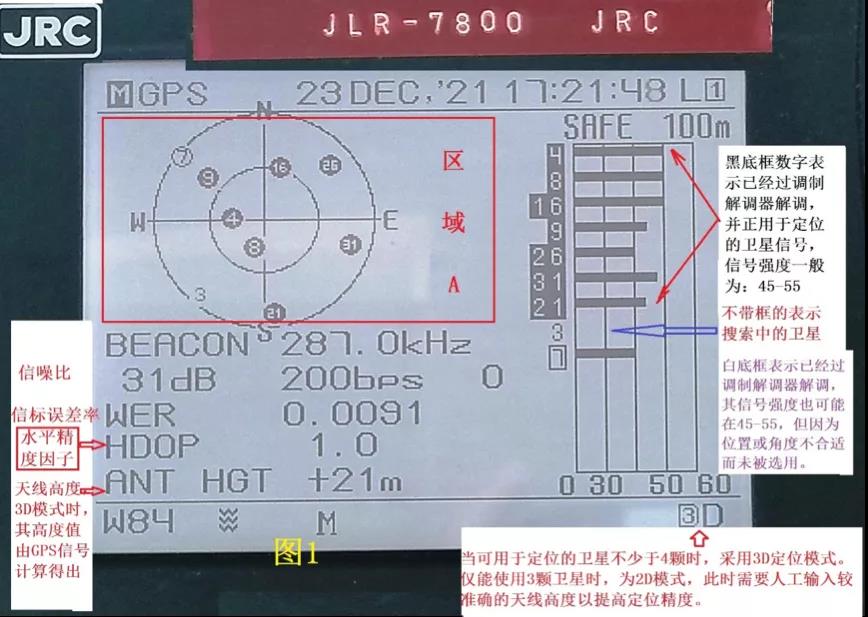
1、HDOP—水平精度因子
数字越小,精度越高,影响该参数的两个主要因素是:
1.定位当时天空中多颗卫星和本船船位之间的相位分布及相互之间的夹角;
2.选定的卫星,在当时船位上方的仰角。
若定位时被GPS系统选定的卫星方位分布均匀、仰角也处于较佳位置时,HDOP数值会变小,所得船位精度较高,反之则精度变差。(见图1中的区域A)
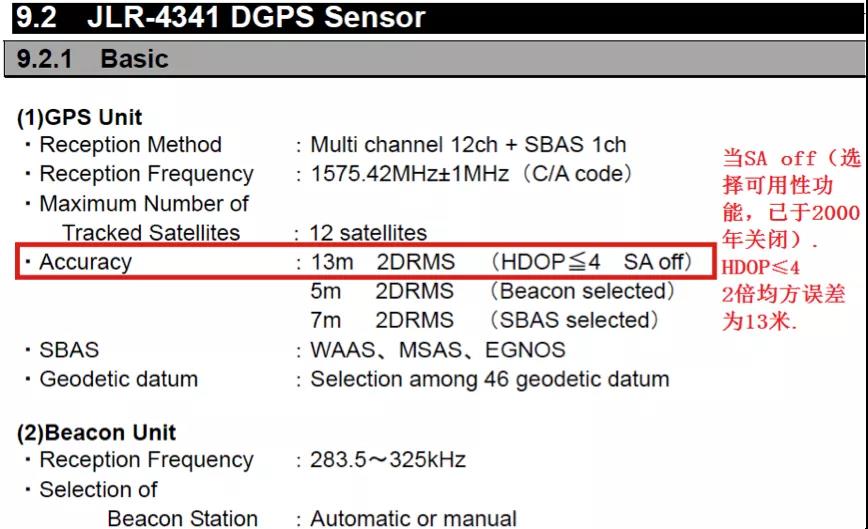
目前虽然GPS定位精度已经达到了10m-20m,DGPS精度更达到1m-5m,但值班驾驶员也要时刻意识到由于硬软件原因,ECDIS中接入的GPS位置传感器信号势必存在数据误差,在受到其他信号干扰时误差会增加,从而导致ECDIS显示船位与实际船位之间差别变大。
根据误差理论分析,为保证双GPS验证方法时的精度,定位时必须确认当时的HDOP值小于4,这可以通过GPS上自带的HDOP阈值选项来实现,根据说明书内容,在3D模式下,HDOP≤4时,它的2倍均方误差≤13m,说明此时ECDIS显示船位可靠。
操作方法以型号为JLR-7500的GPS为例:
MENU键→6. GPS/BEACON/SBAS→4. 此时可以看到HDOP可选水平精度因子阈值,有4/10/20三个选项,出厂默认值为10,本次操作时将其设置为4。须注意,一旦HDOP阈值设定为4,只有当实际HDOP值小于4的船位信号会被GPS接收机选用并给出当时位置,若定位时HDOP大于所设定的阈值,GPS接收机就会出现“HDOP OVER”的报警而不作位置更新。
主副两个GPS信号对ECDIS显示的船位进行核对时的显示界面如图2所示,其中右侧方框内的GPS1为主用《POSN Main》,图上的GPS2为辅助信号《POSN(sub)Source》。
(对于两台GPS接收机中哪台成为信号1或者2,各轮可根据本船实际情况选定,本文略过。)
应注意在进出港、狭水道等受限水域航行时,应缩短核对船位的时间间隔。

图示也表明,当实时定位精度的HDOP值超过4时会出现CAUTION警示,若无警示,则可证明HDOP值在4以内。
2、Signal to Noise Ratio—信噪比
指有用的信号与噪声的比值,数值越大表示有用信号占比越高,定位误差越小。
随着GPS-3A系和北斗3系卫星数量的增加,除非是船舶正处于强电离干扰区域或者是人为因素干扰,目前已不太可能出现因为信噪比低而丢失船位现象,但仍需要注意验证船位时,没有出现此信息的相关报警信号。
三、验证结果的记录
无论使用上述何种方式验证ECDIS船位,值班驾驶员都有必要在ENC上标注验证结果,标注的方法可根据电子海图制造商的不同而有各种形式,如“Entering Position(输入位置)”“Event Mark(事件记录)”“ User Map Editor(用户图表编辑)”等。
特别提示
1、如果船舶仅配备了一台GPS导航仪,自然就没有相互交叉检查的功能,但单机的误差校验原理完全适用。
2、上述的误差分析,仅仅是根据现有GPS系统设置而做的偶然误差分析和操作指导,但对其中的系统误差本文未进行分析和操作指导,因此,GPS导航仪最终显示的船位,应在消除系统误差和其它因素后才能得出本船的实际船位。
作者
中远海运能源运输股份有限公司 “远翠湖”二副 丁奎亮 “远喜湖”二副 孔鲁颂
中远海运能源运输股份有限公司 海务主管 廖才明
专家审稿:方玉林高级船长
请登录后发帖
 联系我们人工客服
联系我们人工客服


















 :1391995811
:1391995811

